Selaa lähdekoodia
update

22 muutettua tiedostoa jossa 251 lisäystä ja 0 poistoa
+ 70
- 0
product/laser/zh-cn/AppQA.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 7
- 0
product/laser/zh-cn/AppReady.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 16
- 0
product/laser/zh-cn/Connect.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 13
- 0
product/laser/zh-cn/MakeScene.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 12
- 0
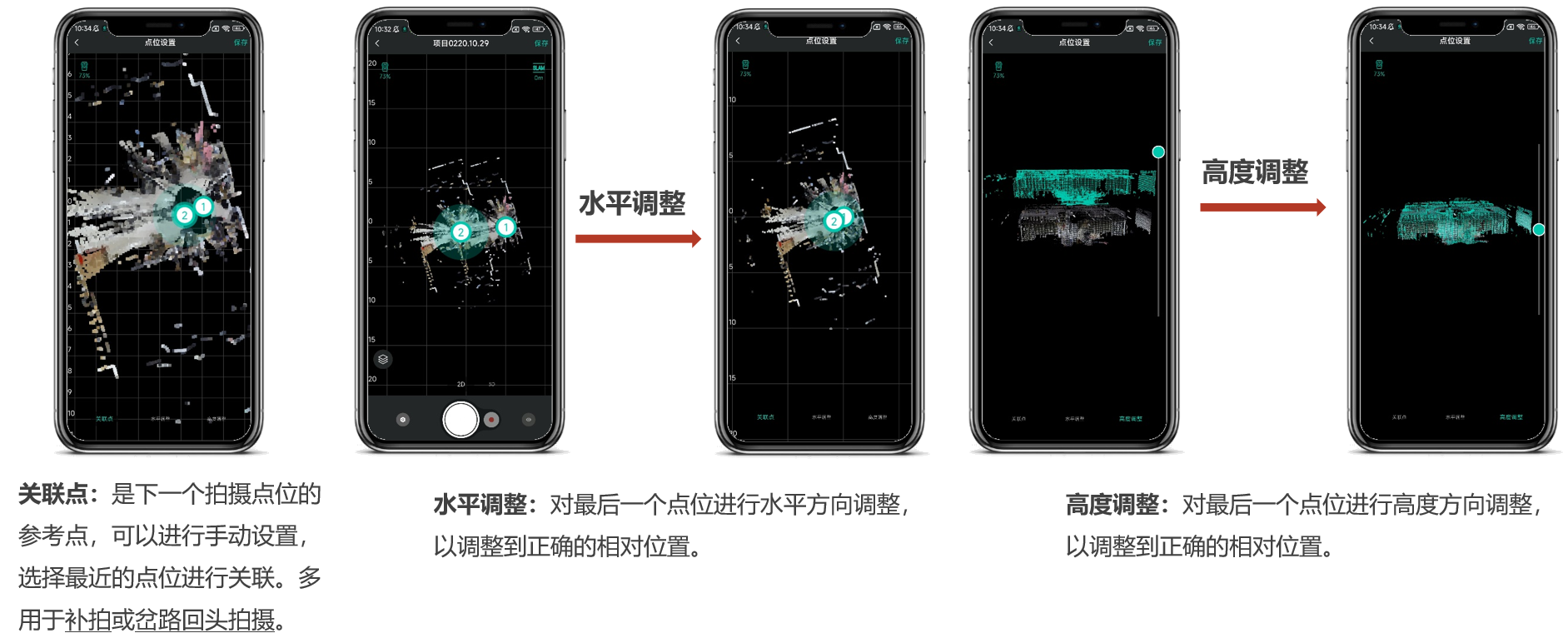
product/laser/zh-cn/PointAdjustment.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 3
- 0
product/laser/zh-cn/SaveScence.md
|
||
|
||
|
||
|
||
+ 50
- 0
product/laser/zh-cn/ShootingDes.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 23
- 0
product/laser/zh-cn/SiteMode.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 20
- 0
product/laser/zh-cn/SiteModeNote.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 6
- 0
product/laser/zh-cn/SlamMode.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 20
- 0
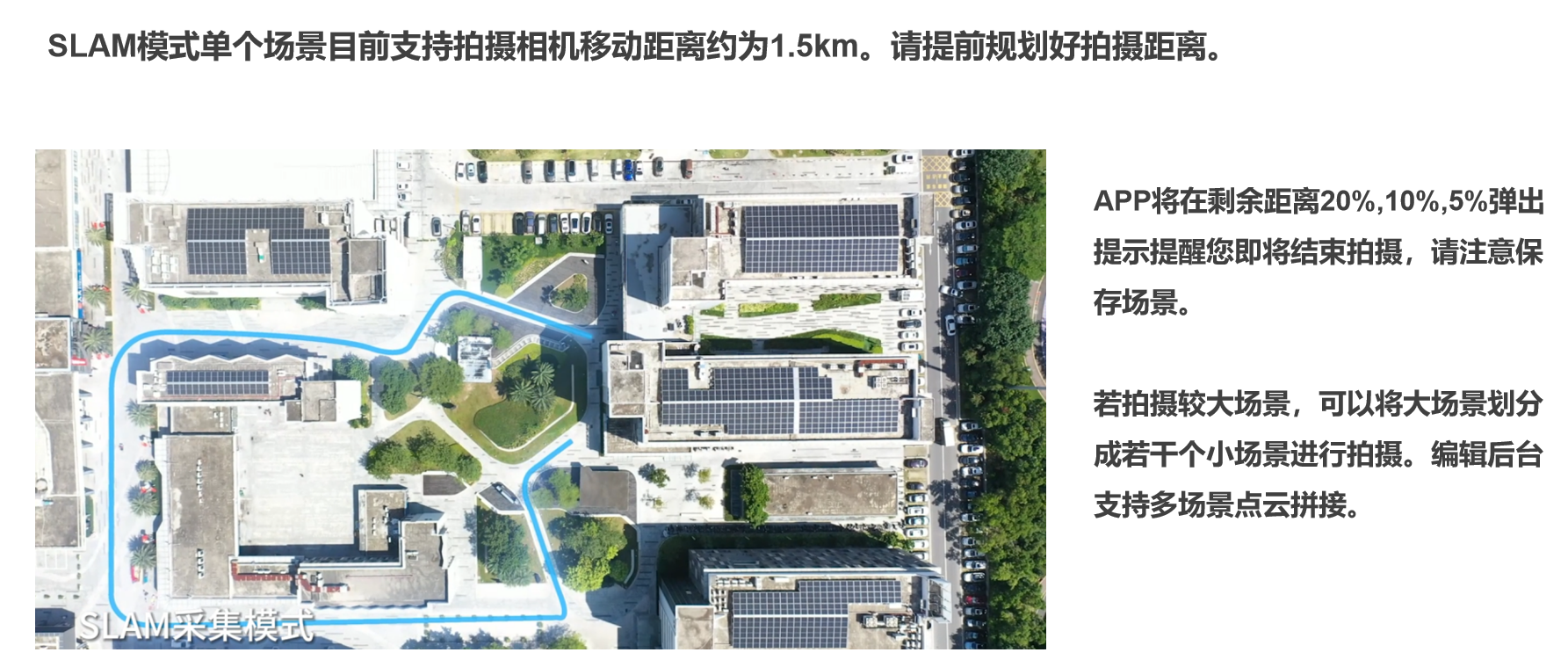
product/laser/zh-cn/SlamModeNote.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 11
- 0
product/laser/zh-cn/_sidebar.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
product/laser/zh-cn/images/app.png
{kind=link}

BIN
product/laser/zh-cn/images/baoguang.png
{kind=link}
BIN
product/laser/zh-cn/images/fenchalu.png
{kind=link}
BIN
product/laser/zh-cn/images/paishejulu.png
{kind=link}
BIN
product/laser/zh-cn/images/point_adjustment.png
{kind=link}
BIN
product/laser/zh-cn/images/slam_shooting.png
{kind=link}

BIN
product/laser/zh-cn/images/slammode.png
{kind=link}
BIN
product/laser/zh-cn/images/yidongxiangji.png
{kind=link}